~~~ La versione in italiano inizia subito dopo la versione in inglese ~~~
ENGLISH

01-09-2025-Mechanical Measurements - How Encoders Work [EN]-[IT] With this post, I would like to provide a brief introduction to the topic mentioned above. (Lesson/Article Code: QE_22)
Image created with artificial intelligence, the software used is Microsoft Copilot
Introduction An encoder is an electromechanical device that converts mechanical motion into a digital electrical signal. It is often used as a positioning system or position control system. There are two main types of encoders: incremental and absolute. Below is an image representing an encoder.
Image created with artificial intelligence, the software used is Microsoft Copilot
Operating principle Inside the encoder, an optical disk (a disk with transparency and opacity) or a magnetic disk (a magnetic disk) is connected to the rotating shaft. The various opacity (marks) or magnetic signals are detected by a sensor. The sensor sends signals that are converted into pulses or binary code. Incremental encoder In the incremental encoder, the signal is converted into pulses. This type of encoder is built with a disc with equidistant notches inside. A light beam passes through the disc or is read by magnetic sensors. Essentially, the notches generate electrical pulses that are counted by electronics external to the encoder. The incremental encoder does not provide the absolute position, but rather the change in position and angular velocity.
Absolute Encoder In the absolute encoder, the signal is converted into a binary code. This type of encoder provides the absolute angular position directly, without counting pulses. The disc is read via Gray code, meaning the disc has multiple concentric tracks encoded in binary. Each angular position corresponds to a unique combination of 0s and 1s read by the sensors. The unique feature of this encoder is that even if the power is removed, the position is immediately known upon power up. Essentially, an absolute encoder requires three main components to function: - a disk with multiple encoded tracks - an array of optical or magnetic sensors - decoding electronics Encoder signals Incremental encoder signals Incremental encoders have three channels: channels A, B, and C. Channel A: square wave Channel B: square wave shifted by 90° Channel Z: narrow pulse per revolution Absolute encoder signals Sequences of logic levels (0/1) that change binary combinations as the angle varies. The typical output signal of an absolute encoder is a parallel binary word (e.g., 8 bits → 256 positions) or a digital serial signal, which directly represents the angle. Typical signal graphs Incremental encoders have typical signals that are square waves, while absolute encoders have a binary code. Below are the graphs of typical signals, first the incremental graph and then the absolute graph. 2
Typical incremental encoder signals
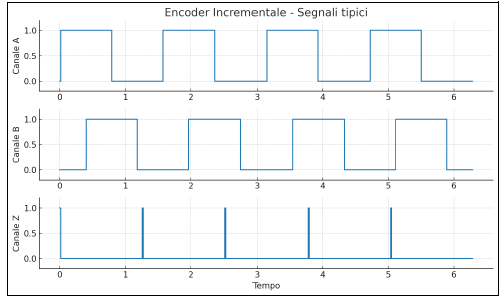
Image created with artificial intelligence, the software used is Microsoft Copilot
Typical encoder signals Absolute
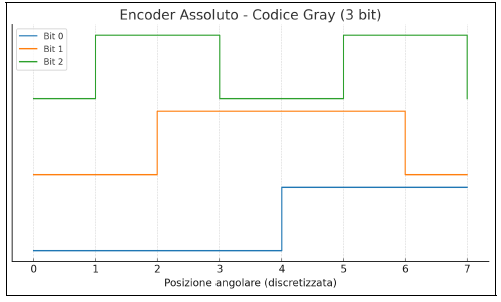
Image created with artificial intelligence, the software used is Microsoft Copilot
Conclusions Simply put, encoders are motion translators that convert mechanical motion into electrical signals. There are two types of encoders: incremental and absolute. Incremental encoders are simple and less expensive than absolute encoders and can be used for relative motion or speed measurement, while absolute encoders are more complicated and expensive, but they are indispensable when exact angular position is needed at all times, especially after a power failure.
Question Encoders weren't invented by any particular researcher, but did you know that Charles Wheatstone (the man who popularized the electronic device now called the Wheatstone bridge and invented the stereoscope) was a pioneer in transducing mechanical signals into electrical ones? Did you know that he conceived the concept behind encoders?

ITALIAN

01-09-2025-Misure meccaniche - Funzionamento degli encoders [EN]-[IT] Con questo post vorrei dare una breve istruzione a riguardo dell’argomento citato in oggetto (codice lezione/articolo: QE_22)
immagine creata con l’intelligenza artificiale, il software usato è Microsoft Copilot
Introduzione Un encoder è un dispositivo elettromeccanico che converte un movimento meccanico in un segnale elettrico digitale. Spesso viene usato come sistema di posizionamento o sistema di controllo posizione. Esistono due tipologie principali di encoder, l’encoder incrementale e quello assoluto. Qui di seguito un'immagine che rappresenta un encoder
immagine creata con l’intelligenza artificiale, il software usato è Microsoft Copilot
Principio di funzionamento Al suo interno l’encoder ha un disco ottico (disco con trasparenze e opacità) o con magneti (disco magnetico) che è collegato all’albero rotante. I vari passaggi delle opacità (tacche) o dei segnali magnetici sono rilevati da un sensore. Il sensore invia dei segnali che vengono convertiti in impulsi o in codice binario. Encoder incrementale Nell’encoder incrementale il segnale viene convertito in impulsi. Questa tipologia di encoder è costruita con al suo interno un disco con tacche equidistanti. Il disco viene attraversato da un fascio luminoso oppure letto da sensori magnetici. Sostanzialmente le tacche generano impulsi elettrici che vengono contati da un elettronica esterna all’encoder. L’encoder incrementale non fornisce la posizione assoluta, ma la variazione di posizione e la velocità angolare.
Encoder assoluto Nell’encoder assoluto il segnale viene convertito in un codice binario. Questa tipologia di encoder fornisce la posizione angolare assoluta direttamente, senza contare impulsi. La lettura del disco avviene tramite il Gray code, ovvero il disco presenta più tracce concentriche codificate in binario. Ogni posizione angolare corrisponde a una combinazione unica di 0 e 1 letta dai sensori. La particolarità di questo encoder è che anche se si toglie l’alimentazione, all’accensione si conosce subito la posizione. Sostanzialmente l’encoder assoluto per funzionare ha 3 componenti principali: -disco con più tracce codificate -array di sensori ottici o magnetici -elettronica di decodifica I segnali degli encoder I segnali dell’encoder incrementale Gli encoder incrementali hanno 3 canali, canale A, B, e C. Canale A: onda quadra Canale B: onda quadra sfasata di 90° Canale Z: impulso stretto ogni giro I segnali dell’encoder assoluto Sequenze di livelli logici (0/1) che cambiano combinazione binaria al variare dell’angolo. Il segnale tipico in uscita di un encoder assoluto è una parola binaria parallela (es. 8 bit → 256 posizioni) oppure seriale digitale, che rappresenta direttamente l’angolo. I grafici dei segnali tipici Gli encoder incrementali hanno dei segnali tipici che sono onde quadre, mentre l’assoluto ha un codice binario. Qui di seguito i grafici dei segnali tipici, prima il grafico dell’incrementale e poi quello dell’assoluto 2
Segnali tipici dell’encoder incrementale
immagine creata con l’intelligenza artificiale, il software usato è Microsoft Copilot
Segnali tipici dell’encoder assoluto
immagine creata con l’intelligenza artificiale, il software usato è Microsoft Copilot
Conclusioni Possiamo dire in parole semplici che gli encoder sono dei traduttori di movimento e convertono il moto meccanico in segnali elettrici. Esistono due tipologie di encoder, incrementali e assoluti. Gli encoder incrementali sono semplici e meno costosi degli encoder assoluti e possono essere usati per spostamenti relativi o misurare velocità, mentre gli encoder assoluti sono al contrario più complicati e costosi, ma sono indispensabili quando serve conoscere sempre la posizione angolare esatta, specialmente anche dopo uno spegnimento.
Domanda Gli encoder non sono stati inventati da un ricercatore o una ricercatrice in particolare, ma sapevate che Charles Wheatstone (quello che rese noto il dispositivo elettronico chiamato oggi ponte di Wheatstone e che inventò lo stereoscopio) fu un pioniere nella trasduzione di segnali meccanici in elettrici? Sapevate che egli ideò il concetto alla base degli encoder?
THE END